案例中心
CASES
机器人视觉抓取系统
机器人视觉抓取系统
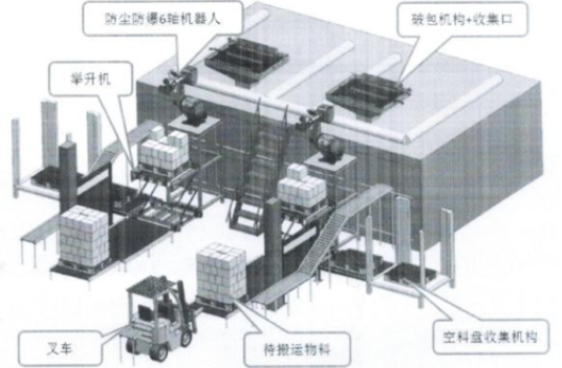
本系统工作要求:①检测2种麻袋,规格一致,只颜色略有差异。②检测速度200包/H。③抓取精度,毫米级。④检测环境:有粉尘, 一定酸性。⑤自动视觉码垛上麻袋的中心坐标给机器人坐标。⑥机器人,新松SRPB80A。

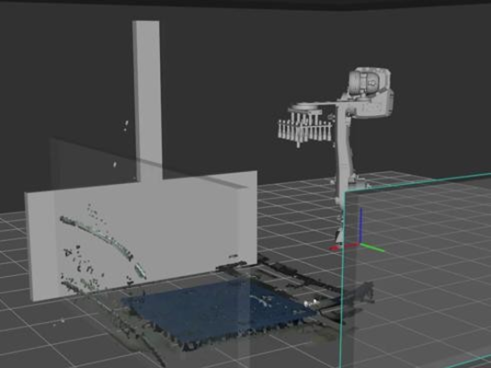
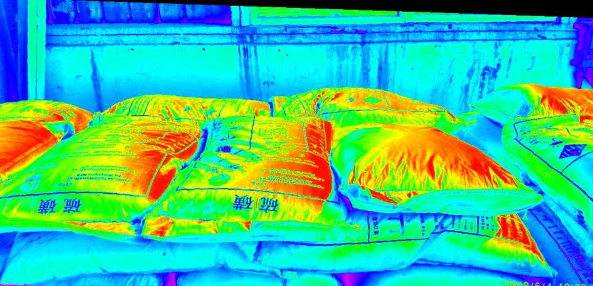
视觉工作流程:①设备启动。②视觉拍摄码垛的上表面信息,形成麻袋的3D点云。③系统根据点云信息,分割图像,人工智能模糊识别麻袋和麻袋的分割点, 找到麻袋中心坐标,④发送给机器人抓取。⑤循环1到4,直到抓取完毕。
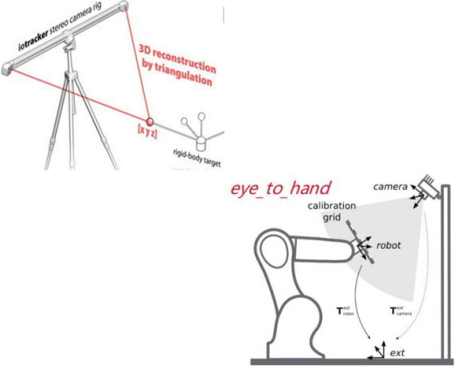
工作原理:双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息的方法。在机器视觉系统中, 双目视觉一般由双摄像机从不同角度同时获取周围景物的两幅数字图像,并基于视差原理即可恢复出物体三维几何信息,重建周围景物的三维形状与位置。
三维效果(整体)
6自由度坐标
